 Terrain robotics
Terrain robotics
Nnamdi Chinomso Chikere
Bioinspired Robotics · Control · Mechatronics
Research portfolio
Advancing adaptive robotics and intelligent systems
I'm a robotics engineer with a passion for creating innovative solutions through automation and artificial intelligence. My expertise spans embedded systems, mechanical design, and intelligent control.
Currently a Ph.D. candidate in Electrical Engineering at the University of Notre Dame, specializing in bioinspired robotics and advanced control systems.
My research integrates hardware design, modeling, and optimization to enable platforms to achieve reliable performance and efficiency in challenging and unstructured environments.
Currently seeking 2026 robotics / controls internships and research collaborations.

Amphibious sea turtle robot
Flipper-driven robot tested on dry sand, wet sand, and rocks. Used to study how body shape, flipper stiffness, and gait parameters affect speed and energy use.
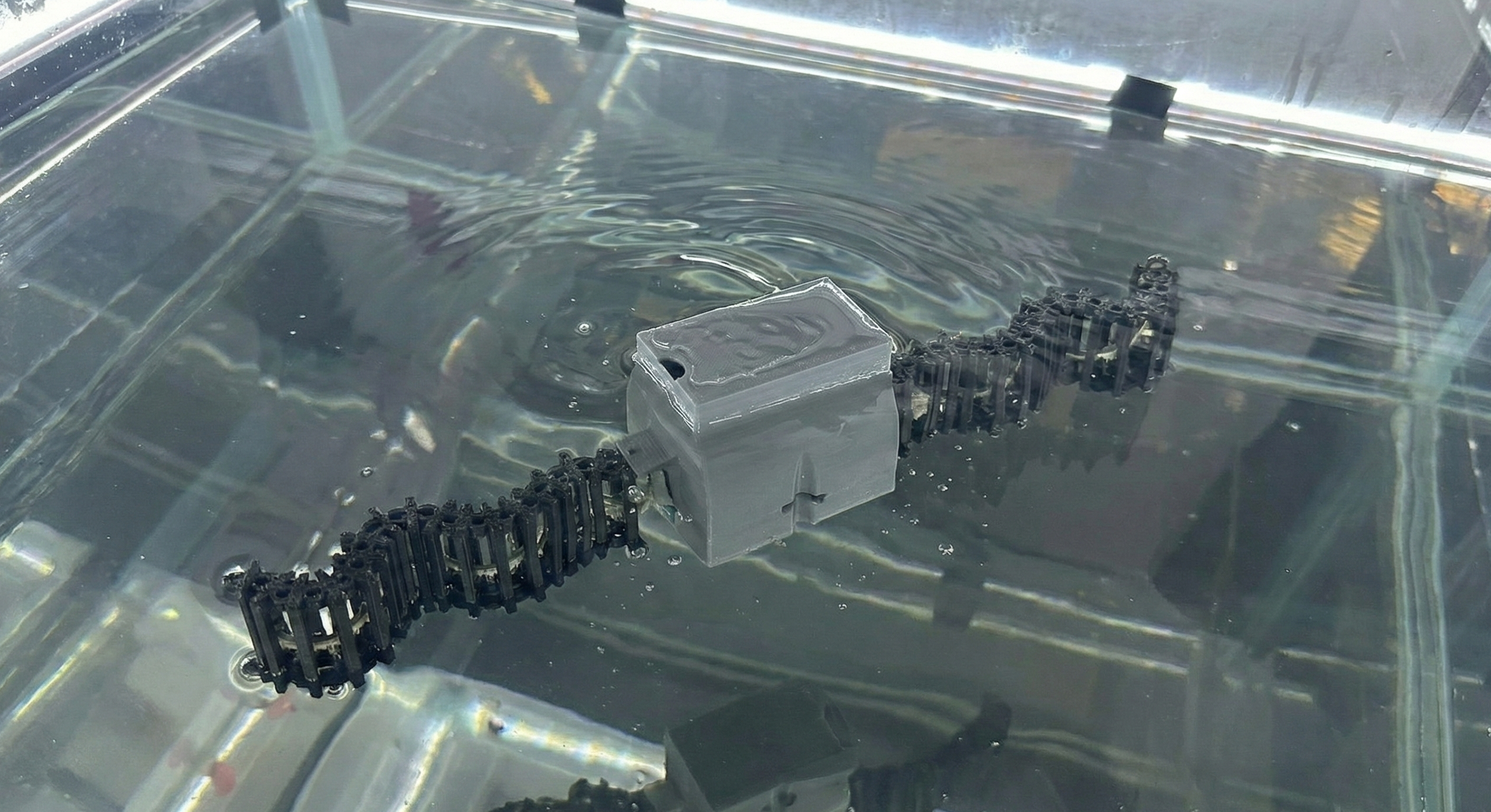
Zoospore-inspired swimmer
Biflagellated low-Reynolds-number robot with flexible flagella. Experiments connect frequency and flagella length to propulsion and force production.
Selected Projects
A sample of my work across amphibious locomotion, compliant quadrupeds, microswimmers, and multi-robot systems.
Terrain robotics
 Flipper-based locomotion
Flipper-based locomotion
Robust Maneuverability in Flipper-Based Systems
Paper: Robust Maneuverability in Flipper-Based Systems Across Complex Terrains → Legged locomotion
Legged locomotion
Variable-Stiffness Tail for Quadruped Stability & Maneuverability
Paper: Effect of Tail Stiffness on Sprawling Quadruped Locomotion → Low-Reynolds locomotion
Low-Reynolds locomotion
Zoospore-Inspired Robotic Swimmer with Dual Flagella
Paper: Flagellar Swimming at Low Reynolds Numbers → Low-Reynolds locomotion
Low-Reynolds locomotion
Quadriflagellated Zoospore-Inspired Swimmer
Paper: Harnessing Flagella Dynamics for Enhanced Robot Locomotion → Multi-robot systems
Multi-robot systems
Collective Object Transport Robots
Manuscript in preparation Control & optimization
Control & optimization
Hopf-CPG Control and Bayesian Optimization
Simulation + hardware experiments on sea turtle robot Embedded Vision
Embedded Vision
Machine Learning Dashboard Camera System
GitHub Repository →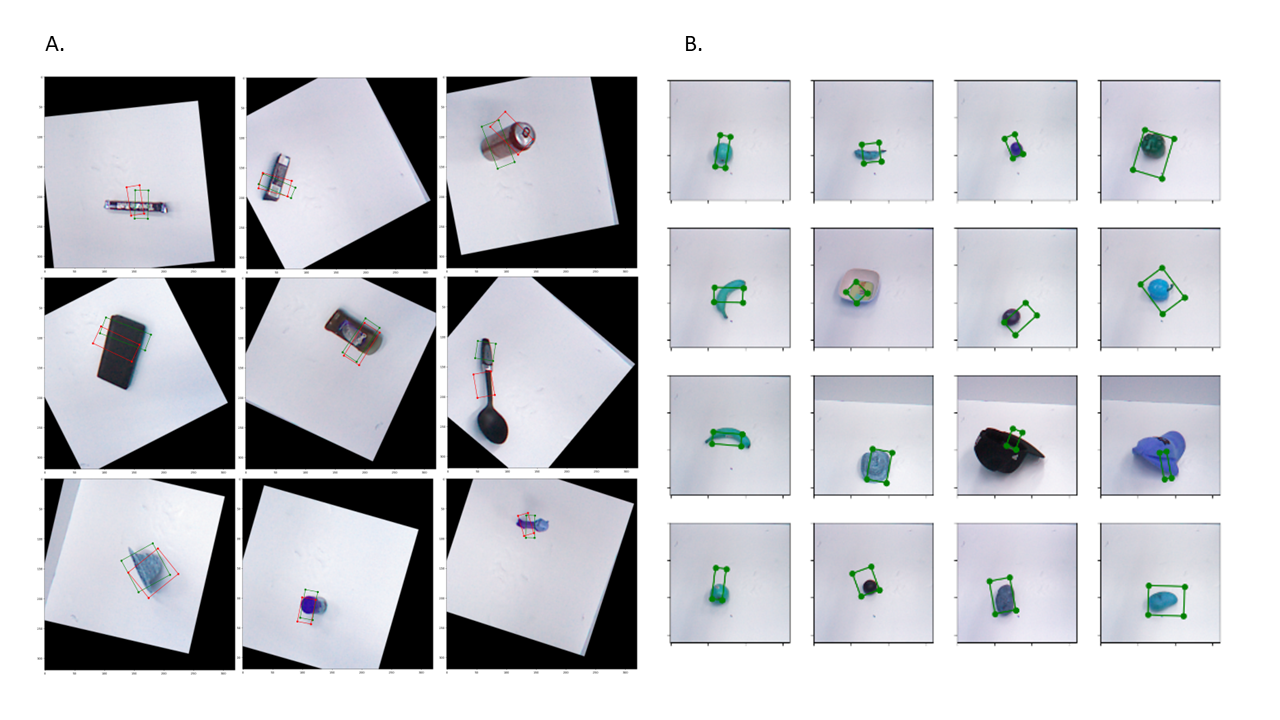 Perception
Perception
Deep Learning–Based Grasp Detection
Internal research projectTechnical Skills
Tools I use most often when designing, building, and testing robots.
MATLAB / Simulink
Python · NumPy
MuJoCo
ROS · Raspberry Pi
KiCad (PCB design)
SolidWorks · Fusion 360
Embedded C / microcontrollers
Sensor fusion
Optimization
Reinforcement learning basics
Experimental design & data analysis
Test & Reliability
Selected Publications
- Zoospore-Inspired Robotic Swimmers with Dual Flagella for High-Speed Locomotion, Bioinspiration & Biomimetics, 2025. Link
- Robust Maneuverability in Flipper-Based Systems Across Complex Terrains, Bioinspiration & Biomimetics, 2025. Link
- Swimming Dynamics of a Soft Flagellated Robot in Low Reynolds Number Environment, The 19th International Symposium on Experimental Robotics (ISER 2025), 2025. Link
- Embodied Design for Enhanced Flipper-Based Locomotion, Nature Scientific Reports, 2025. Link
- Harnessing Flagella Dynamics for Enhanced Robot Locomotion at Low Reynolds Number, IEEE Robotics and Automation Letters, 2024. Link
- The effect of tail stiffness on a sprawling quadruped locomotion, Frontiers in Robotics and AI, 2023. Link
Video Highlights
Short demonstrations of my robotic systems in action.
Stability
Quadruped Tail-Assisted Stabilization
Amphibious
Sea Turtle–Inspired Robot
Turning
Flipper-Based Turning Maneuvers
Low-Re
Quadriflagellated Algae-Inspired Swimmer
Soft flagella in Low-Re
Soft Flagellated Robot for Low-Re Swimming
Contact
I am happy to talk about internships, collaborations, and speaking opportunities related
to robotics, control, and locomotion.